
Dinámica del sistema masa-resorte-amortiguador con ODE45.
El siguiente ‘script’ muestra un sistema masa-resorte-amortiguador, resuelto con la función ODE45. Además, la fuerza ‘u’ externa puede ser considerada a través de la función fuerza().
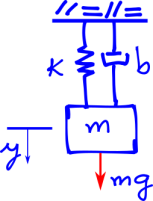
function nonlinearModel() to=0; % start time tf=20; % end time t=linspace(to,tf,100); yo(1)=2; % initial condition yo(2)=0; [t,ydot] = ode45(@(t,y)nonlinear(t,y),t,yo); plot(t,ydot) function [ydot] = nonlinear(t,y) % parameters k=1; b=1/2; m=1; % proportional plus derivative control action u=fuerza(t); %u=0; % no control action ydot=[y(2); - k/m*y(1) - b/m*y(2) + 1/m*u]; endfunction function u=fuerza(t) u=1; %f=10; %u=sin(2*pi*f*t); endfunction endfunction
La figura resultante es, donde la linea azul corresponde a la posición y la linea roja corresponde a la velocidad.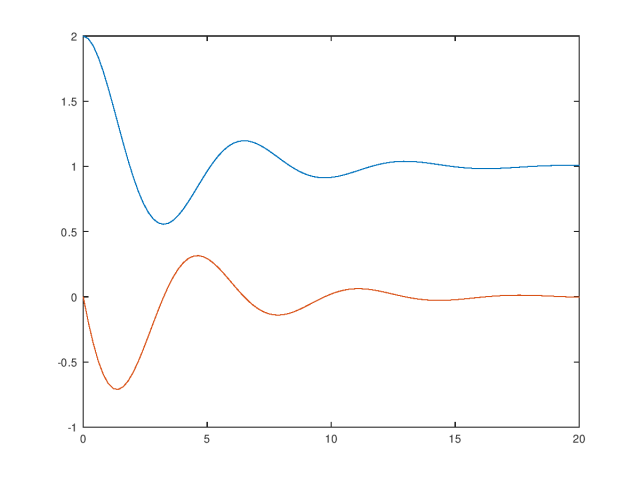
Vamos a suponer que la fuerza en el resorte es cuadrática respecto el desplazamiento. Por tanto se deberá sustituir el término – k/m*y(1) por – k/m*y(1)^2 , y ejecutar nuevamente el script. ODE45 estará resolviendo el modelo no lineal.
NOTA: el cambio de variable y1’=y1-mg/k fue realizado para trasladar el punto de equilibrio del sistema de (mg/k,0) para (0,0).
